
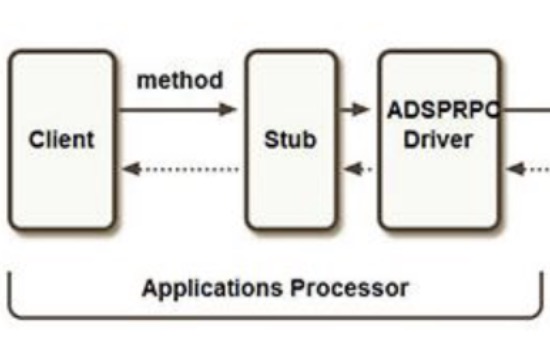
将计算负载从CPU卸载到Qualcomm Hexagon DSP
在无人机、机器人和智能相机等等实时计算场景中,开发者们始终在寻找一个平衡点——既要高性能,又要低功耗。Qualcomm Hexagon DSP(数字信号处理器)提供了一个极具吸引力的解决方案,而FastRPC则是连接CPU与DSP之间的关键桥梁。
Qualcomm FastRPC Hexagon DSP时间:2026-07-20 10:32:22
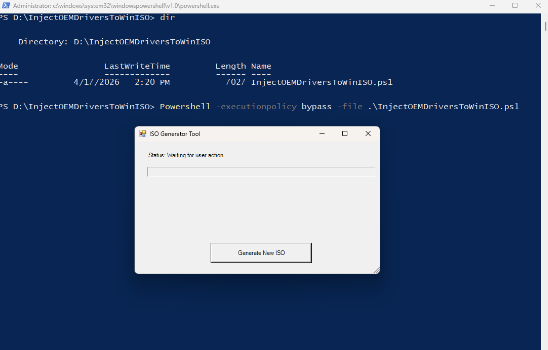
Windows 系统部署系列(2):基于 PowerShell 图形化工具的 Windows ISO OEM 驱动集成指南
本文提出一种基于 PowerShell 图形化工具的 Windows ISO 驱动集成方案,通过自动化完成映像挂载、驱动注入与 ISO 重构,解决部署过程中设备识别与兼容性问题,并提升企业级 Windows 在 OEM 及 ARM64 平台上的部署成功率。
Qualcomm 骁龙X系列 AIPC WoS时间:2026-07-17 11:41:00
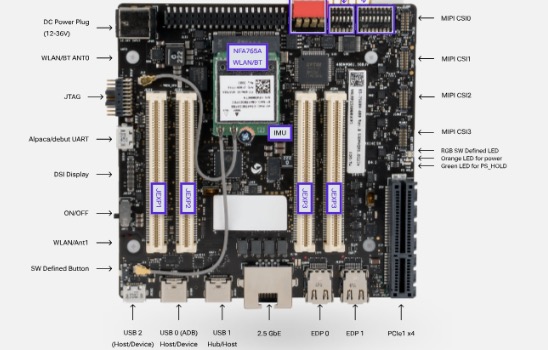
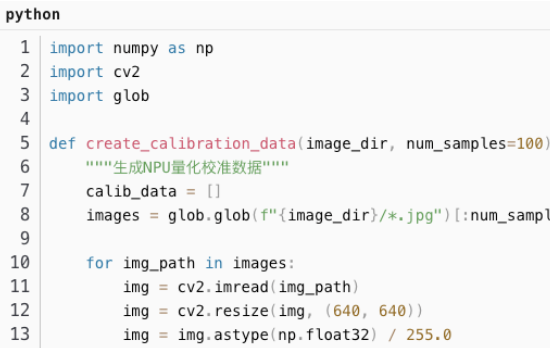
高通跃龙IQ-9100平台上部署7B模型FastRPC通过IOMMU零拷贝调用DSP服务的原理
我们之前记录了7B模型在高通跃龙IQ-9100平台上的SMMU映射失败诊断和限制突破,讲的是实际工程遇到的问题和解决方法,但没有对底层概念的理解。这一篇将往下一层深入探索和理解。
Qualcomm fastRPC SMMU IOMMU时间:2026-07-16 09:27:50
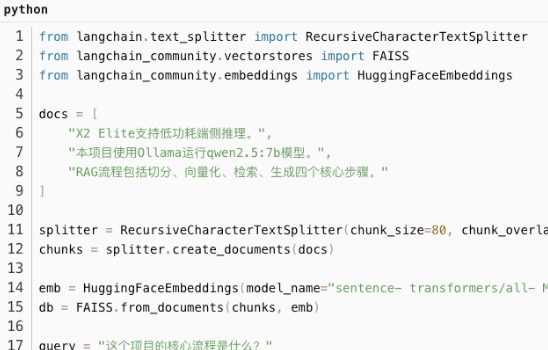
骁龙X2 Elite平台AI实战(3):部署本地RAG知识库问答系统
这篇实战直接带你在骁龙X2 Elite笔记本上把本地RAG(检索增强生成)问答环境跑起来。这套方案的目标很明确:文档不出本机、问答响应可控、开发流程可复现。我们先从环境搭建和基础验证开始,接着把FAISS 检索链路和Prompt策略补齐,形成完整可用的本地知识问答系统。
Qualcomm X2 Elite 骁龙 RAG知识库时间:2026-07-15 09:45:33

骁龙X2 Elite平台AI实战(2): 部署离线会议纪要助手
本博客分两个部分,完整记录在骁龙X2 Elite Windows ARM64笔记本上搭建离线会议纪要助手的所有步骤。第一部分whisper.cpp环境搭建与会议录音转写实战;第二部分利用本地大模型(Ollama + Qwen2.5:7b)做摘要整理与待办生成。
Qualcomm 骁龙 X2 Elite 会议助手时间:2026-07-14 09:08:16
骁龙X2 Elite平台AI实战(1): 搭建本地AI编程助手
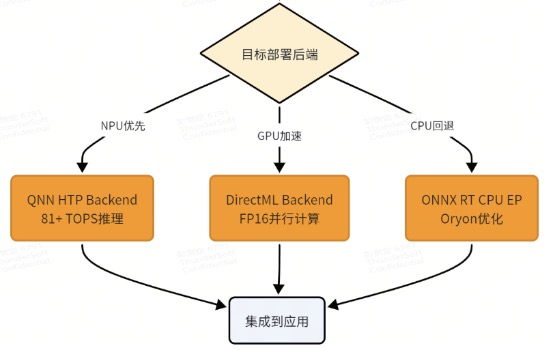
最近入手了一台搭载骁龙 X2 Elite (X2E-96-100) 的轻薄本,18 核 Oryon CPU + 85 TOPS Hexagon NPU,这配置不拿来跑本地 AI 简直是浪费。之前已经写过 X2 Elite 的架构解析和 边缘AI应用开发,这次打算系统性地从零开始,手把手带你在这台 ARM64 笔记本上搭建一套完整的本地 AI 开发环境。
Qualcomm 人工智能 AI编程 骁龙时间:2026-07-13 09:58:52
Windows 系统部署系列(1):基于ARM架构的Windows 11 系统安装指南
本文档说明了在 ARM 架构设备上,通过 U 盘 完成 Windows 11 全新安装的操作流程,以及系统安装完成后的初始配置说明,并补充了在 FAT32 启动场景下拆分 install.wim 文件的必要方法
Qualcomm 骁龙X 系列平台 AI PC时间:2026-07-09 14:15:13
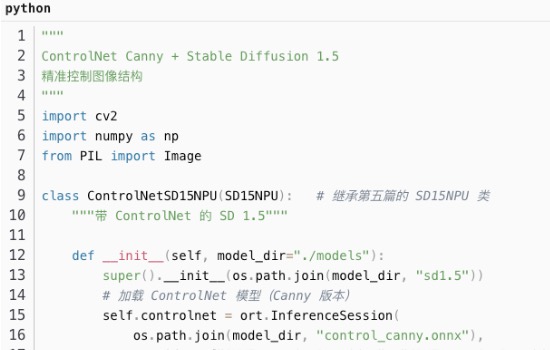
骁龙X2 Elite边缘AI应用开发实战(5): AIGC实战之Stable Diffusion 3与ControlNet部署
上一篇我们成功在 X2 Elite NPU 上运行了 Stable Diffusion 1.5,实现了 2 秒/图的极速生成。这一篇我们将挑战更先进的 SD3(Diffusion Transformer) 和 ControlNet,让生成更加可控、质量更高,同时介绍如何在 32GB 内存机型上优化 SD3 Large 模型。
Qualcomm 人工智能 AIGC stable diffusion时间:2026-07-09 13:31:21

骁龙X2 Elite边缘AI应用开发实战(4): AIGC实战之Stable Diffusion 1.5极速文生图
上一篇我们构建了完全离线的端侧智能语音助手,VAD、Whisper、Phi-3-mini、VITS 四个模型全部运行在 NPU 上,实现了从麦克风到音箱的全链路。这一篇我们将开启 AIGC 之旅的第一站——在 X2 Elite 上本地运行 Stable Diffusion 1.5,实现 2 秒一张 512×512 图片,完全离线,无需云端。
Qualcomm 人工智能 AIGC stable diffusion时间:2026-07-08 10:10:47
骁龙X2 Elite边缘AI应用开发实战(3): 端侧智能语音助手全链路实现
上一篇我们实现了实时视觉检测,NPU推理延迟低至5ms,通过流水线设计达到了200+ FPS。这一篇我们将挑战更复杂的多模型流水线——语音助手,从麦克风输入到音箱输出,全部在X2 Elite本地完成。
Qualcomm 人工智能 骁龙X2时间:2026-07-07 09:31:49
骁龙X2 Elite边缘AI应用开发实战(2): 实时视觉AI应用开发
上一篇我们完成了开发环境搭建,验证了QNN EP可以正常调用NPU,并了解了QNN SDK v3.0的新特性。本篇将把这一切用到真实场景中——让X2 Elite的摄像头“看懂”世界。
Qualcomm 人工智能时间:2026-07-06 09:42:23
Qualcomm 开发者专区是 Qualcomm 联合CSDN 共同打造的面向中国开发者的技术专区。致力于通过提供全球最新资讯和最多元的技术资源及支持,为开发者们打造全面一流的开发环境。本专区将以嵌入式、物联网、游戏开发、Qualcomm® 骁龙™处理器的软件优化等技术为核心,打造全面的开发者技术服务社区,为下一代高性能体验和设计带来更多的想法和灵感。
加入 Qualcomm 开发者专区


申请成为“Qualcomm荣誉技术大使”
“Qualcomm荣誉技术大使”是Qualcomm开发者社区对开发者用户技术能力与影响力的认证体现,该荣誉代表Qualcomm社区对用户贡献的认可与肯定。
立即申请
高通技术公司推出头戴式AR开发套件骁龙Spaces™ XR开发者平台,助力打造无缝融合现实世界和数字世界边界的沉浸式体验。
为开发者提供实现创意的工具,并将变革头戴式AR的可能性,现已面市!