
Qualcomm骁龙Micro Rover 实例应用APP2:导航仪
示例应用2:导航仪
导航仪是一款驱动Micro Rover的基本双摇杆Android应用。用户可利用本应用手动控制机器人所有功能。
前提条件
• 可正常工作的Micro Rover
• 运行4.0或更高版本的Android设备,配置为开发者模式:
• Android Debug Bridge(ADB),可以在
Android SDK的SDK工具部分找到
•
More details on ADB
•
Google USB Driver
•
Instructions to enable Developer Options
• Micro USB线缆
•
MDRSimpleNavigator-release.apk
设置
安装应用
• 在Android设备上,进入开发人员选项菜单,启用“USB调试”
• 然后连接Android设备至PC
• 在设备上,可能会出现访问是否接受RSA密钥以允许调试连接至PC的提示,接受密钥
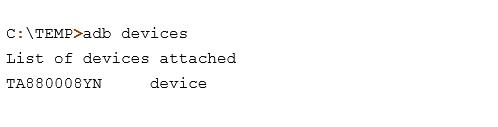
• 在PC命令行窗口,验证ADB是否工作,输入“adb devices”。如果成功,将列出序列号和状态。状态栏出现“device”表示ADB已连接。
• 从PC命令行,更改目录到MDRSimpleNavigator.apk位置
• 在PC命令行中输入“adb install -r MDRSimpleNavigator.apk”
• 如安装成功ADB 将返回“成功”

Android设备配对IOIO板
• Android设备通过蓝牙与机器人IOIO板控制器通信。
• 打开机器人。IOIO板红色LED应点亮,蓝牙适配器闪烁,表明正在工作
• 在Android设备上,打开设置
• 在设备设置菜单,开启蓝牙
• 在设备设置菜单,点击开/关滑块左侧区域选择蓝牙
• 在设备的蓝牙菜单,经过扫描设备之后,可用设备应列出IOIO板

• 从可用设备列表中,选择IOIO板
• 在配对对话框中,输入默认IOIO pin码“4545”,然后点击确认
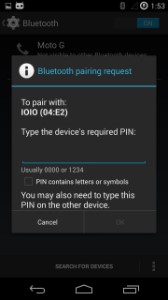
• 现在,Android设备和IOIO板应配对成功

操作
• 打开Micro Rover
• 在Android设备应用托盘中找到标签为MDR Simple
Navigator的图标

• 点击图标,打开应用
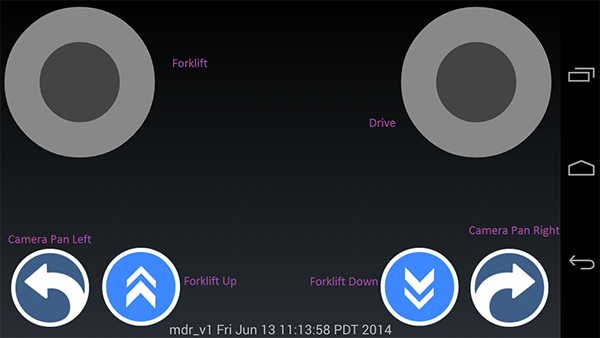
• 此应用包含多个控制机器人的按键
• 左摇杆控制叉臂上下移动并回至中心
• 右摇杆控制驱动:按比例操纵摇杆位置控制其前、后、左、右移动
• 尾部左右按键控制摄像头平移
• 内部上下按键控制叉臂绝对位置
Qualcomm 开发者专区是 Qualcomm 联合CSDN 共同打造的面向中国开发者的技术专区。致力于通过提供全球最新资讯和最多元的技术资源及支持,为开发者们打造全面一流的开发环境。本专区将以嵌入式、物联网、游戏开发、Qualcomm® 骁龙™处理器的软件优化等技术为核心,打造全面的开发者技术服务社区,为下一代高性能体验和设计带来更多的想法和灵感。
加入 Qualcomm 开发者专区


申请成为“Qualcomm荣誉技术大使”
“Qualcomm荣誉技术大使”是Qualcomm开发者社区对开发者用户技术能力与影响力的认证体现,该荣誉代表Qualcomm社区对用户贡献的认可与肯定。
立即申请招贤纳士
Qualcomm在中国的业务发展迅速,每年提供大量的技术岗位,分布在北京,上海,深圳等地。Qualcomm开发者社区是开发者藏龙卧虎之地,Qualcomm中国HR特别设立了招聘通道,欢迎开发者同学踊跃报名。